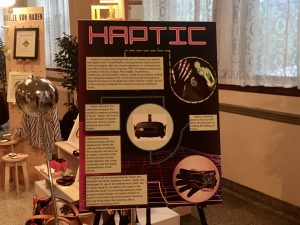
We designed a haptic glove which could generate the feeling of touching when users interact with the object in Virtual Reality. The haptic glove is made with an Arduino Uno microcontroller, conductive wires and rumble balls, which are well sewed and integrated with the glove. And we used Unity to create a Virtual Reality Game that puts users into the scene of the universe, allowing users to interact with the objects such as (Cube Planet, Sphere Planet, etc.) in it. For the virtual reality part, we used Oculus virtual reality goggles and Leap Motion to support our project. When users interact with the virtual reality, they could see their hands in the shape of robot hands in the virtual reality by the implementation of Leap Motion. And when the user touches the object in the virtual reality, the game will send a signal to the glove, and then the glove will run the rumble ball based on which finger the user is used to touch. In this way, the user could have a feeling of touching when they are in virtual reality. We see this as a way of linking the physic world with virtual reality world.
We are pleased about our project at the end, though it is our plan B. Our plan A is to use actuator memory wires to implement the glove. This kind of actuator memory wire is a new kind of materials. Our idea is that when the user touches the object in virtual reality, the wires will contract to generate a force to the touching finger. However, we tested the wires for two weeks with different voltages and shapes. As the performance of the wires was not stable enough to support our idea, we adjusted our plan and changed to use rumble balls. We tested the rumble ball with different frequencies and found the right one to generate the feeling of touching. When we presented in the fashion show, many users told us that it was really cool to have the actual feeling of touching in virtual reality.
If we could have more time, we would like to keep working on the idea of using the actuator memory wires. We would like to invite someone who is familiar with studying new materials to work with us. We want to try our best to provide better touching experience to the users.

 Listing of accomplishments made by all group members for the previous week
Listing of accomplishments made by all group members for the previous week
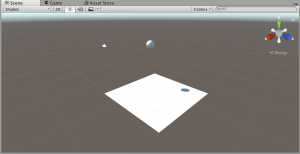 Bouncing ball scene in Unity
Bouncing ball scene in Unity
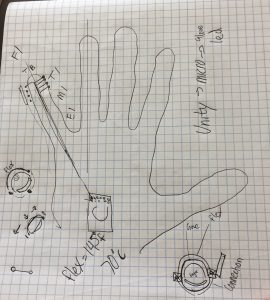
 Connection\mounting type will be a looped conventional wire, or perforated actuato
Connection\mounting type will be a looped conventional wire, or perforated actuato r ribbon. Electrical connection will run in the gloves hemming for aesthetics and practicality.
r ribbon. Electrical connection will run in the gloves hemming for aesthetics and practicality.