Final Project

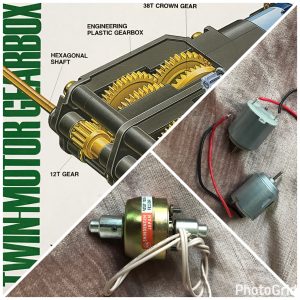
- How it works: In its final form, the heel requires manual manipulation to adjust the height. In theory, an internal stepper motor will be attached to the heel via a spring. The rotation of the motor will enable the heel to expand and contract when activated by the Bluetooth sensor on the Adafruit board.
Final Poster

Describe how well did your project meet your original project description and goals.
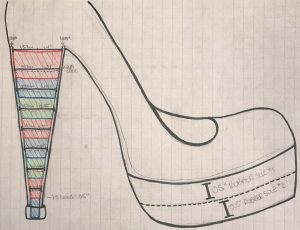
- Goal #1: Adjustable Heel
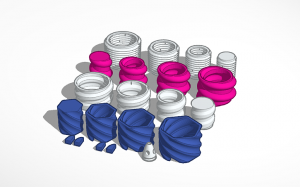
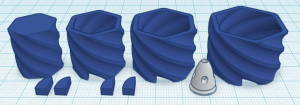
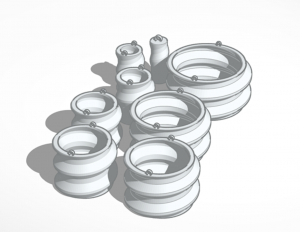
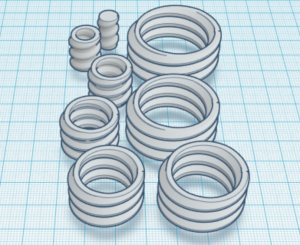
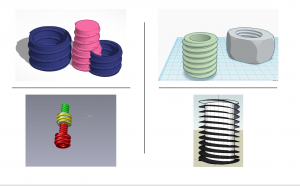
- I was able to design the heel components very similarly to how I originally planned. One pivot is that I initially wanted the heel to be covered, but I ended up liking the look of the exposed pieces better.
- Goal #2: Electronic Movement
- I was able to work with Kevin to program the stepper motor to move the internal spring. However, in order to have the needed length, I had to solder two springs together and during the final testing of the movement the solder broke.
- Goal #3: Operated by Bluetooth
- This was one aspect of the project that I was not able to get to due to timing.
Describe the largest hurdles you encountered. How did you overcome these challenges?
- When I originally came up with the idea for this project, I think that I underestimated the degree to which the unknown elements would hinder my success. For example, in my head I was planning on purchasing the outer shell of the heel. Then when it became clear that the pieces did not exist in the form I needed them, I decided I would just make CADs and 3D print them, but I did not fully understand how hard that would be. I think that this portion of the project was by far the largest hurdle that I encountered and sheer persistence and crowd sourcing solutions from my classmates helped me to overcome these issues.
Describe what would you do next if you had more time
- If I had more time I would have liked to make the movement work and be operated by the Adafruit Bluetooth board that I purchased. As I was able to finalize the heel pieces by the end of the project, I was approaching this stage as the semester came to an end, so I do not think that that would have been an unrealistic goal. I think that having more time would have allowed me to purchase a longer spring, rather than having to solder two smaller ones together and just experiment more with the actual functionality.