 Listing of accomplishments made by all group members for the previous week
Listing of accomplishments made by all group members for the previous week
- Got the LED to work with the Unity system
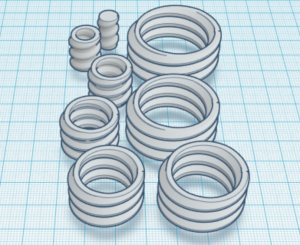
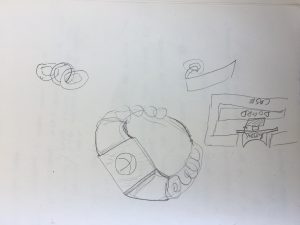
- Created prototypes of the wire housing and connection types.
- Considered different options to trigger haptic feedback, such as weaving the wire, or linking it.
A description of problems encountered and outstanding issues
- Conflicting results with SMA, possibly due to way the wire was spinned together, to many wires absorbing load, or power supply.
- Troubleshooting problems with activating the gravity mechanic in Unity, getting to know unity’s physical game engine,
A plan for the next week of work
- Sink or swim
- Abort memory wire if conflicting results persist, pursuing alternative haptic responses
- Finish with the Unity integration, and look towards integrating leap motion.
- Develop the housing and other concepts into integration of the glove.





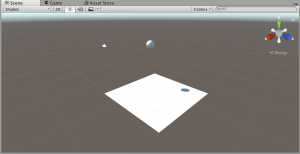 Bouncing ball scene in Unity
Bouncing ball scene in Unity


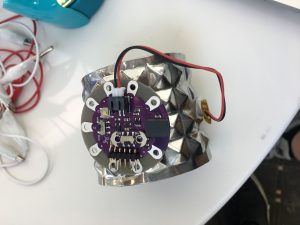 Using a large cuff right now to have an idea of what the prototype could look like.
Using a large cuff right now to have an idea of what the prototype could look like.