On Thursday Emma was figuring out how she could possibly 3D print part of the bracelet so all the tech won’t show or be felt when the bracelet is worn. Thought of using the 3D printer to print a sort of square box that the simblee and battery could sit in, which would allow the button to be pressed from the exterior wearer.
Planning to continue to work on the 3D printing concept this week using TinkerCAD.
 Using a large cuff right now to have an idea of what the prototype could look like.
Using a large cuff right now to have an idea of what the prototype could look like.
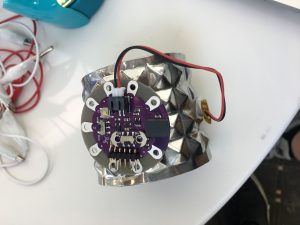
On Tuesday Keegan was able to get the Simblee up and running with code to use a vibration motor uploaded from computer to laptop. This was a step in the right direction, but the next step will be trying to upload code through Bluetooth not just through a corded connection. The Bluetooth on the Simblee was proven to work to at least his iPhone though the Simblee mobile application.
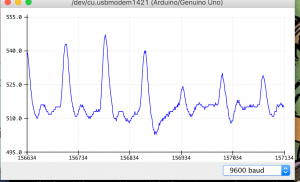
The uploaded Simblee Bluetooth code was for a temperature probe or just the internal temperature of the Simblee device. This code was fairly basic (and already completed) but it was still exciting to see the iPhone connect via Bluetooth and display a temperature value that actually responded to temperature changes.
Moving forward with code we want to work on how to program via Bluetooth and work on using time in the code. I haven’t quite figured how to work in sending a signal after a certain amount of time has passed. In my head it should be a simple if== “HIGH” for 3 s…then “do this” but the code has not worked out so simply.